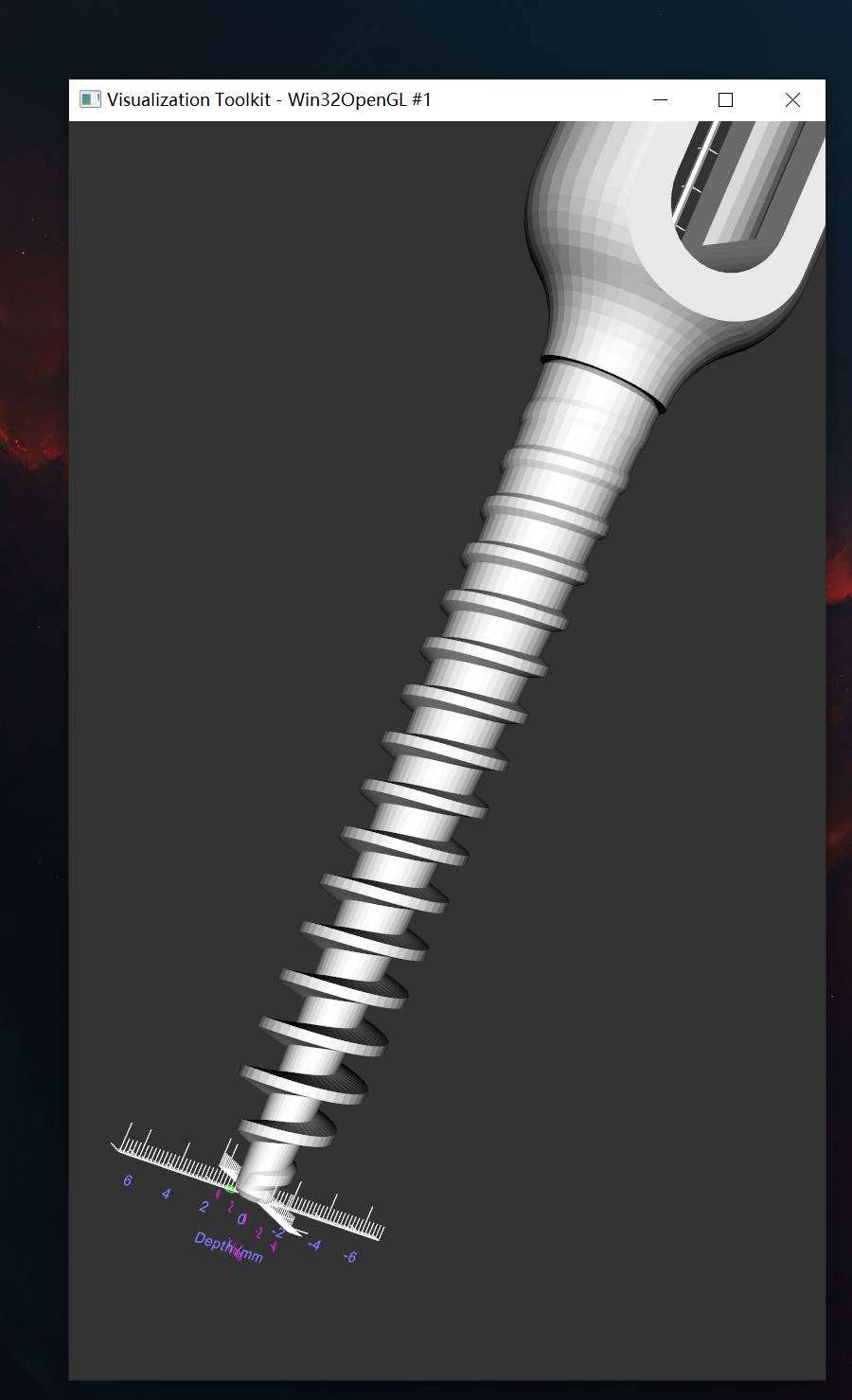
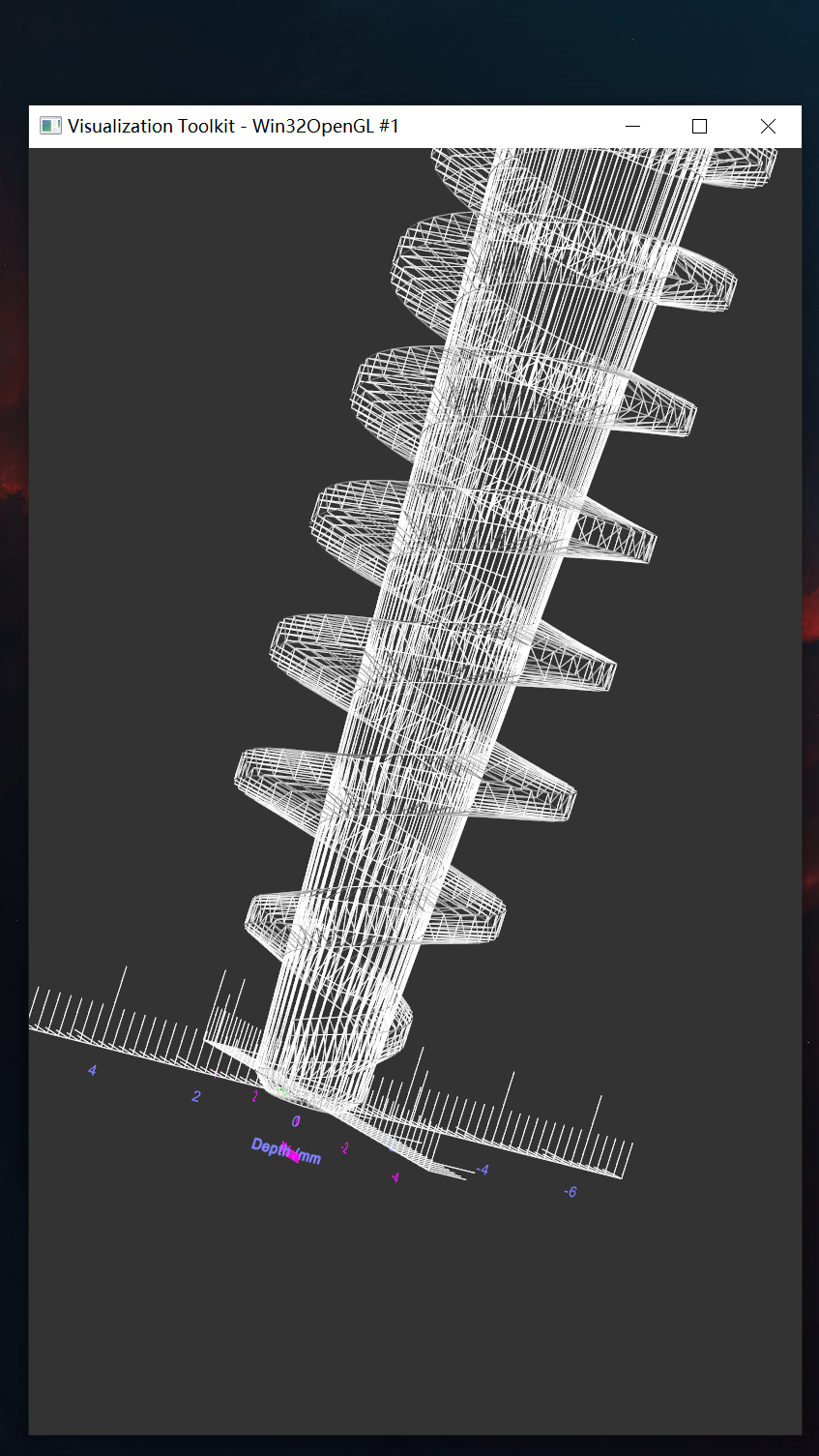
绘制螺钉螺纹线¶
 |  |
|---|---|
需要在ct三视图上画出来螺钉的每个截面。螺钉的长度和直径都不确定,需要动态调整。
用现成的 vtkSphereSource 改的 vtkSphereSource
设定一些参数,计算螺纹线。
class VtkPedicleScrewSource : public vtkPolyDataAlgorithm
{
public:
static VtkPedicleScrewSource * New();
vtkTypeMacro(VtkPedicleScrewSource, vtkPolyDataAlgorithm);
void PrintSelf(ostream & os, vtkIndent indent) override;
vtkSetMacro(Subdivision, int);
vtkGetMacro(Subdivision, int);
vtkSetMacro(TopR, double);
vtkGetMacro(TopR, double);
vtkSetMacro(Length, double);
vtkGetMacro(Length, double);
vtkSetMacro(V, double);
vtkGetMacro(V, double);
vtkSetMacro(D, double);
vtkGetMacro(D, double);
vtkSetMacro(BottonmR, double);
vtkGetMacro(BottonmR, double);
vtkSetMacro(Chamfering, double);
vtkGetMacro(Chamfering, double);
vtkSetMacro(Ascending, double);
vtkGetMacro(Ascending, double);
vtkSetMacro(GuideHeight, double);
vtkGetMacro(GuideHeight, double);
vtkSetMacro(PedicleRotateX, double);
vtkGetMacro(PedicleRotateX, double);
vtkSetMacro(PedicleTranslateX, double);
vtkGetMacro(PedicleTranslateX, double);
vtkSetMacro(PedicleTranslateY, double);
vtkGetMacro(PedicleTranslateY, double);
vtkSetMacro(PedicleTranslateZ, double);
vtkGetMacro(PedicleTranslateZ, double);
vtkSetStringMacro(PedicleFileName);
vtkGetStringMacro(PedicleFileName);
protected:
VtkPedicleScrewSource(int res = 6);
~VtkPedicleScrewSource() override;
int RequestData(vtkInformation *, vtkInformationVector **, vtkInformationVector *) override;
protected: // 遵循vtk命名
int OutputPointsPrecision;
int Subdivision = 40; // 每一圈螺纹细分数量
double TopR = 3.0; // 圆台顶部半径
double Length = 55.0; // 总长度
double V = 0.06; // 螺旋线前进速度
double D = 0.5; // 螺纹宽度
double BottonmR = 1.0; // 圆台底部半径
double Chamfering = 0.3; // 螺纹倒角
double Ascending = 0.3; // 螺栓倒角
double GuideHeight = 150; // 引导线高度
// 模型坐标系乱选的,让他们最后重新提供吧
double PedicleRotateX = 180;
double PedicleTranslateX = -5;
double PedicleTranslateY = 7;
double PedicleTranslateZ = 18;
char * PedicleFileName; // 椎弓根名称
private:
VtkPedicleScrewSource(const VtkPedicleScrewSource &) = delete;
void operator=(const VtkPedicleScrewSource &) = delete;
};
int VtkPedicleScrewSource::RequestData(
vtkInformation * vtkNotUsed(request),
vtkInformationVector ** vtkNotUsed(inputVector),
vtkInformationVector * outputVector)
{
vtkInformation * outInfo = outputVector->GetInformationObject(0);
vtkPolyData * output = vtkPolyData::SafeDownCast(outInfo->Get(vtkDataObject::DATA_OBJECT()));
//
std::vector<int> triangle_cell {
0, 2, 6, 0, 4, 6, 1, 3, 7, 1, 5, 7,
0, 1, 5, 0, 4, 5, 2, 3, 7, 2, 6, 7,
0, 1, 3, 0, 2, 3, 0, 1, 5, 0, 4, 5,
0, 2, 6, 0, 4, 6, 2, 3, 7, 2, 6, 7,
1, 5, 0, 3, 7, 0
};
// 螺钉---螺纹
vtkNew<vtkPolyData> screw_1;
vtkNew<vtkPoints> points_1;
vtkNew<vtkCellArray> cells_1;
vtkNew<vtkTriangle> trianle;
double Omega = M_PI * 2.0 / Subdivision; // 角速度
double H = (Length - 16) * TopR / (TopR - BottonmR); // 圆锥高度
vtkIdType number = static_cast<vtkIdType>(H * (TopR - BottonmR) / (V * TopR)); // 螺旋线点总数
int begin_t = static_cast<int>(H * BottonmR / (V * TopR)); // 螺旋线起始时间(圆台底部)
// 螺钉---螺纹---四条螺旋线 points
for (int i = 0; i < number; i++) {
int T = begin_t + i;
double x = TopR * V * T / H * cos(Omega * T);
double y = TopR * V * T / H * sin(Omega * T);
double z = V * T + Ascending;
points_1->InsertNextPoint(x, y, z);
z -= D + Ascending * 2;
points_1->InsertNextPoint(x, y, z);
if (i < Subdivision * 2) {
x += TopR * cos(Omega * T) * (1 - V * T / H) * (i + 1) / (Subdivision * 2);
y += TopR * sin(Omega * T) * (1 - V * T / H) * (i + 1) / (Subdivision * 2);
} else {
x = TopR * cos(Omega * T);
y = TopR * sin(Omega * T);
}
z = V * T;
points_1->InsertNextPoint(x, y, z);
z -= D;
points_1->InsertNextPoint(x, y, z);
}
// 螺钉---螺纹---螺纹 cells
for (int i = 0; i < number * 4 - 4; i = i + 4) {
for (unsigned long long j = 0; j < 8; j++) {
trianle->GetPointIds()->SetId(0, i + triangle_cell.at(j * 3 + 0));
trianle->GetPointIds()->SetId(1, i + triangle_cell.at(j * 3 + 1));
trianle->GetPointIds()->SetId(2, i + triangle_cell.at(j * 3 + 2));
cells_1->InsertNextCell(trianle);
}
}
screw_1->SetPoints(points_1);
screw_1->SetPolys(cells_1);
// 螺钉---圆台
vtkNew<vtkPolyData> screw_2;
vtkNew<vtkPoints> points_2;
vtkNew<vtkCellArray> cells_2;
for (int i = 0; i < Subdivision; i++) {
double x = BottonmR * cos(Omega * i);
double y = BottonmR * sin(Omega * i);
double z = V * begin_t - Ascending - D;
points_2->InsertNextPoint(x, y, z);
x = (BottonmR - Chamfering) * cos(Omega * i);
y = (BottonmR - Chamfering) * sin(Omega * i);
z -= Chamfering;
points_2->InsertNextPoint(x, y, z);
x = TopR * cos(Omega * i);
y = TopR * sin(Omega * i);
z = V * (static_cast<double>(begin_t + number)) + Ascending;
points_2->InsertNextPoint(x, y, z);
x = (TopR - Chamfering) * cos(Omega * i);
y = (TopR - Chamfering) * sin(Omega * i);
z += Chamfering;
points_2->InsertNextPoint(x, y, z);
}
double x = BottonmR * cos(Omega * 0);
double y = BottonmR * sin(Omega * 0);
double z = V * begin_t - Ascending - D;
points_2->InsertNextPoint(x, y, z);
x = (BottonmR - Chamfering) * cos(Omega * 0);
y = (BottonmR - Chamfering) * sin(Omega * 0);
z -= Chamfering;
points_2->InsertNextPoint(x, y, z);
x = TopR * cos(Omega * 0);
y = TopR * sin(Omega * 0);
z = V * (static_cast<double>(begin_t + number)) + Ascending;
points_2->InsertNextPoint(x, y, z);
x = (TopR - Chamfering) * cos(Omega * 0);
y = (TopR - Chamfering) * sin(Omega * 0);
z += Chamfering;
points_2->InsertNextPoint(x, y, z);
points_2->InsertNextPoint(0, 0, V * begin_t - Ascending - Chamfering - D);
points_2->InsertNextPoint(0, 0, V * (static_cast<double>(begin_t + number)) + Ascending + Chamfering);
for (unsigned long long j = 8; j < 10; j++) {
trianle->GetPointIds()->SetId(0, triangle_cell.at(j * 3 + 0));
trianle->GetPointIds()->SetId(1, triangle_cell.at(j * 3 + 1));
trianle->GetPointIds()->SetId(2, triangle_cell.at(j * 3 + 2));
cells_2->InsertNextCell(trianle);
}
for (int i = 0; i < Subdivision; i++) {
vtkIdType offset = i * 4;
for (unsigned long long j = 10; j < 16; j++) {
trianle->GetPointIds()->SetId(0, offset + triangle_cell.at(j * 3 + 0));
trianle->GetPointIds()->SetId(1, offset + triangle_cell.at(j * 3 + 1));
trianle->GetPointIds()->SetId(2, offset + triangle_cell.at(j * 3 + 2));
cells_2->InsertNextCell(trianle);
}
trianle->GetPointIds()->SetId(0, offset + triangle_cell.at(16 * 3 + 0));
trianle->GetPointIds()->SetId(1, offset + triangle_cell.at(16 * 3 + 1));
trianle->GetPointIds()->SetId(2, (Subdivision + 1) * 4);
cells_2->InsertNextCell(trianle);
trianle->GetPointIds()->SetId(0, offset + triangle_cell.at(17 * 3 + 0));
trianle->GetPointIds()->SetId(1, offset + triangle_cell.at(17 * 3 + 1));
trianle->GetPointIds()->SetId(2, (Subdivision + 1) * 4 + 1);
cells_2->InsertNextCell(trianle);
}
screw_2->SetPoints(points_2);
screw_2->SetPolys(cells_2);
// 螺钉
vtkNew<vtkAppendPolyData> screw_append;
screw_append->AddInputData(screw_2);
screw_append->AddInputData(screw_1);
vtkNew<vtkTransform> screw_translation;
screw_translation->Translate(0, 0, -1 * (V * (static_cast<double>(begin_t + number)) + Ascending + Chamfering));
vtkNew<vtkTransformPolyDataFilter> screw_transform;
screw_transform->SetInputConnection(screw_append->GetOutputPort());
screw_transform->SetTransform(screw_translation);
// 椎弓根
vtkNew<vtkPolyData> pedicle;
vtkNew<vtkSTLReader> pedicle_reader;
pedicle_reader->SetFileName(PedicleFileName);
vtkNew<vtkTransform> pedicle_translation;
pedicle_translation->Translate(PedicleTranslateX, PedicleTranslateY, PedicleTranslateZ);
pedicle_translation->RotateX(PedicleRotateX);
vtkNew<vtkTransformPolyDataFilter> pedicle_transform;
pedicle_transform->SetInputConnection(pedicle_reader->GetOutputPort());
pedicle_transform->SetTransform(pedicle_translation);
// 引导线
vtkNew<vtkCylinderSource> guide_line;
guide_line->SetHeight(GuideHeight);
guide_line->SetCenter(0, -0.5 * GuideHeight, 0);
guide_line->SetRadius(0.2);
vtkNew<vtkTransform> guide_translation;
guide_translation->RotateX(-90);
vtkNew<vtkTransformPolyDataFilter> guide_transform;
guide_transform->SetInputConnection(guide_line->GetOutputPort());
guide_transform->SetTransform(guide_translation);
// 组合
vtkNew<vtkAppendPolyData> out_append;
out_append->AddInputConnection(screw_transform->GetOutputPort());
out_append->AddInputConnection(pedicle_transform->GetOutputPort());
out_append->AddInputConnection(guide_transform->GetOutputPort());
// 螺栓是按照 xy->z 画的,显示是xz->y
out_append->Update();
double center[3];
out_append->GetOutput()->GetCenter(center);
vtkNew<vtkTransform> out_translation;
out_translation->PostMultiply();
out_translation->Translate(0, 0, center[2]);
out_translation->RotateX(90);
out_translation->Translate(0, center[2], 0);
out_translation->Translate(0, -Length + 16 - 2 * D - Chamfering - Ascending, 0);
vtkNew<vtkTransformPolyDataFilter> out_transform;
out_transform->SetInputConnection(out_append->GetOutputPort());
out_transform->SetTransform(out_translation);
out_transform->Update();
output->DeepCopy(out_transform->GetOutput());
return 1;
}
使用
int main(int argc, char *argv[])
{
QApplication::setAttribute(Qt::AA_DontCheckOpenGLContextThreadAffinity);
QGuiApplication::setAttribute(Qt::AA_EnableHighDpiScaling);
QGuiApplication::setAttribute(Qt::AA_UseHighDpiPixmaps);
QApplication a(argc, argv);
vtkNew<VtkPedicleScrewSource> poly_data;
{
poly_data->SetSubdivision(40); // 每一圈螺纹细分数量
poly_data->SetTopR(3.0); // 圆台顶部半径
poly_data->SetLength(56.0); // 圆锥高度(不是圆台高度)
poly_data->SetV(0.06); // 螺旋线前进速度
poly_data->SetD(0.5); // 螺纹宽度
poly_data->SetBottonmR(1.0); // 圆台底部半径
poly_data->SetChamfering(0.3); // 螺纹倒角
poly_data->SetAscending(0.3); // 螺栓倒角
poly_data->SetGuideHeight(150); // 引导线高度
poly_data->SetPedicleRotateX(180);
poly_data->SetPedicleTranslateX(-5);
poly_data->SetPedicleTranslateY(7);
poly_data->SetPedicleTranslateZ(18);
}
{
poly_data->SetPedicleFileName("./etc/Pedicle_screw.STL"); // 椎弓根文件名称
}
std::cout << *poly_data << std::endl;
poly_data->Update();
ShowVtkDebugPolydata(poly_data->GetOutput());
return 0;
}