CPR¶
1 原理¶
CPR+-+Curved+Planar+Reformation
下载: https://www.jianguoyun.com/p/DXY5HOoQgYiuCRia-PED (访问密码 : r0ga0d)
2 曲面重建CPR步骤¶
- 输入点拟合样条曲线(利用
vtkSplineFilter) - 计算样条曲线各点的法向量(弗莱纳公式)
- 根据点和法向量截取图片(
vtkProbeFilter) - 每张图片拼接起来(
vtkImageAppend)
3 VTK实现¶
常用功能vtk肯定提供现成办法
- 期刊 地址
https://www.vtkjournal.org/browse/publication/838 - 期刊 Github 地址(只包含了计算曲线法相和样条曲线切割的实现和测试)
https://github.com/midas-journal/midas-journal-838 - 作者项目 Github 地址(还带了一堆其他的算法和测试以及paraview的插件)
https://github.com/djelouze/vtkKinship
4 使用¶
作者案例写的很完整。
-
方法一:增加远程模块:
Module_SplineDrivenImageSlicer:BOOL(vtk9要自己改一下cmakelists)作者写的我看起来比较吃力,改了下,剔除一些没用的,并添加注释。下边2和3是自己完整改完之后的
-
方法二:把
FrenetSerretFrame和SplineDrivenImageSlicer直接添加到自己工程
两个都用过,第二个更好。自己可以改,这个是我最终改的版本:
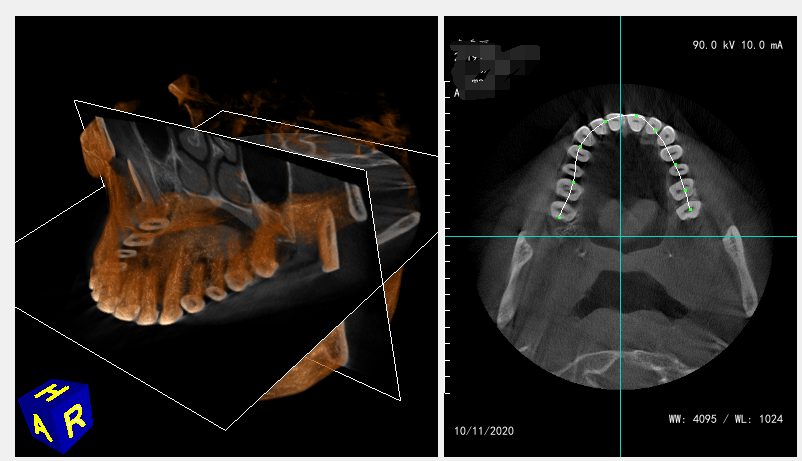
4.1 输入点拟合样条曲线(利用vtkSplineFilter)¶
捕获样条曲线直接用 vtkContourWidget即可,他的rep可以得到世界坐标。结合背景ImageReslicers的4*4变换矩阵可以得到点的空间位置。
利用vtkContourWidget捕获点
vtkContourWidget *wid = vtkContourWidget::New();
wid->SetInteractor(m_renderWindows[2]->GetInteractor());
wid->CreateDefaultRepresentation();
wid->On();
m_scrollConnection->Connect(
wid, vtkCommand::EndInteractionEvent, this, SLOT(
SlotContourEndInteractionEvent(
vtkObject *, unsigned long, void *, void *))
, nullptr, 0.0, Qt::UniqueConnection);
计算点的空间位置
auto widget = dynamic_cast<vtkContourWidget *>(t_obj);
auto rep = dynamic_cast<vtkOrientedGlyphContourRepresentation *>(widget->GetContourRepresentation());
if(rep) {
vtkMatrix4x4 *sourceMatrix = m_resliceWidget->getImageReslicers()[2]->GetResliceAxes();
qint32 n = rep->GetNumberOfNodes();
for (qint32 i = 0; i < n; ++i) {
double p[3];
rep->GetNthNodeWorldPosition(i, p);
vtkNew<vtkTransform> transform1;
transform1->SetMatrix(sourceMatrix);
transform1->Translate(p[0], p[1], 0);
qDebug() << i
<< transform1->GetMatrix()->GetElement(0, 3)
<< transform1->GetMatrix()->GetElement(1, 3)
<< transform1->GetMatrix()->GetElement(2, 3);
}
}
拟合曲线
vtkNew<vtkSplineFilter> spline_filter;
spline_filter->SetSubdivideToLength();
spline_filter->SetLength(0.2);
spline_filter->SetInputData(poly_data);
spline_filter->Update();
4.2 计算样条曲线各点的法向量(弗莱纳公式)¶
根据弗莱纳公式计算曲线向量
#include"vtkPoints.h"
#include"vtkPolyDataAlgorithm.h"
#include"vtkPolyData.h"
#include"vtkCellArray.h"
/**
* @brief The CBCTFrenetSerretFrame class
* 弗莱纳公式(Frenet–Serret formulas)
*/
class CBCTFrenetSerretFrame : public vtkPolyDataAlgorithm {
public:
vtkTypeMacro(CBCTFrenetSerretFrame, vtkPolyDataAlgorithm)
static CBCTFrenetSerretFrame *New();
vtkSetMacro(view_up_, double)
vtkGetMacro(view_up_, double)
static void RotateVector( double *vector, const double *axis, double angle );
protected:
CBCTFrenetSerretFrame();
~CBCTFrenetSerretFrame() override;
virtual int RequestData(
vtkInformation *, vtkInformationVector **, vtkInformationVector *)override;
virtual int FillInputPortInformation(int port, vtkInformation *info)override;
// 计算导数
void ComputeTangentVectors(vtkIdType pointIdNext,
vtkIdType pointIdLast,
double *tangent);
// 计算二阶导数
void ComputeNormalVectors(double *tgNext,
double *tgLast,
double *normal );
// 由切线定义的平面上最后法线的投影
void ComputeConsistentNormalVectors( double *tangent,
double *lastNormal,
double *normal);
private:
CBCTFrenetSerretFrame(const CBCTFrenetSerretFrame &);
void operator=(const CBCTFrenetSerretFrame &);
double view_up_;
int consistent_normals_;
};
#include "vtkDoubleArray.h"
#include "vtkPointData.h"
#include "vtkMath.h"
#include "vtkInformation.h"
#include "vtkInformationVector.h"
#include "vtkObjectFactory.h"
vtkStandardNewMacro(CBCTFrenetSerretFrame);
CBCTFrenetSerretFrame::CBCTFrenetSerretFrame( ) {
this->consistent_normals_ = 1;
this->view_up_ = 0;
}
CBCTFrenetSerretFrame::~CBCTFrenetSerretFrame( ) {
}
int CBCTFrenetSerretFrame::FillInputPortInformation(int port, vtkInformation *info) {
if( port == 0 ) {
info->Set(vtkAlgorithm::INPUT_REQUIRED_DATA_TYPE(), "vtkPolyData");
}
return 1;
}
int CBCTFrenetSerretFrame::RequestData(
vtkInformation *vtkNotUsed(request),
vtkInformationVector **inputVector,
vtkInformationVector *outputVector) {
vtkInformation *inInfo = inputVector[0]->GetInformationObject(0);
vtkInformation *outInfo = outputVector->GetInformationObject(0);
vtkPolyData *input = vtkPolyData::SafeDownCast(
inInfo->Get(vtkDataObject::DATA_OBJECT()));
vtkPolyData *output = vtkPolyData::SafeDownCast(
outInfo->Get(vtkDataObject::DATA_OBJECT()));
output->DeepCopy( input );
vtkDoubleArray *tangents = vtkDoubleArray::New( );
tangents->SetNumberOfComponents( 3 );
tangents->SetNumberOfTuples( input->GetNumberOfPoints( ) );
tangents->SetName("FSTangents");
vtkDoubleArray *normals = vtkDoubleArray::New( );
normals->SetNumberOfComponents( 3 );
normals->SetNumberOfTuples( input->GetNumberOfPoints( ) );
normals->SetName("FSNormals");
vtkCellArray *lines = output->GetLines( );
lines->InitTraversal();
vtkIdType nbPoints;
vtkIdType *points;
int cellIdx;
for( cellIdx = 0; cellIdx < lines->GetNumberOfCells( ); cellIdx++ ) {
lines->GetNextCell( nbPoints, points);
for( int i = 0 ; i < nbPoints; i++) {
double tangent[3];
if( i == 0 ) {
this->ComputeTangentVectors( points[0], points[1], tangent );
} else if( i == nbPoints - 1 ) {
this->ComputeTangentVectors( points[nbPoints - 2], points[nbPoints - 1], tangent );
} else {
this->ComputeTangentVectors( points[i - 1], points[i + 1], tangent );
}
vtkMath::Normalize( tangent );
tangents->SetTuple(points[i], tangent);
}
for( int i = 0 ; i < nbPoints; i++) {
if( !this->consistent_normals_ || i == 0) {
double tangentLast[3], tangentNext[3], normal[3];
if( i == 0 ) {
tangents->GetTuple( points[i], tangentLast);
} else {
tangents->GetTuple( points[i - 1], tangentLast);
}
if( i == nbPoints - 1 ) {
tangents->GetTuple( points[i], tangentNext);
} else {
tangents->GetTuple( points[i + 1], tangentNext);
}
this->ComputeNormalVectors( tangentLast, tangentNext, normal );
if( this->consistent_normals_ ) {
this->RotateVector( normal, tangentLast, this->view_up_ );
}
vtkMath::Normalize( normal );
normals->SetTuple(points[i], normal);
}
if( this->consistent_normals_ && i != 0) {
double tangent[3], lastNormal[3], normal[3];
normals->GetTuple(points[i - 1], lastNormal);
tangents->GetTuple(points[i], tangent);
this->ComputeConsistentNormalVectors( tangent,
lastNormal,
normal );
vtkMath::Normalize( normal );
normals->SetTuple(points[i], normal);
}
}
}
output->GetPointData( )->AddArray( normals );
output->GetPointData( )->AddArray( tangents );
normals->Delete( );
tangents->Delete( );
return 1;
}
void CBCTFrenetSerretFrame::ComputeTangentVectors(
vtkIdType pointIdNext, vtkIdType pointIdLast, double *tangent ) {
vtkPolyData *input = static_cast<vtkPolyData *>(this->GetInput( 0 ));
double ptNext[3];
double ptLast[3];
input->GetPoint( pointIdNext, ptNext);
input->GetPoint( pointIdLast, ptLast);
int comp;
for( comp = 0; comp < 3; comp++ ) {
tangent[comp] = ( ptLast[comp] - ptNext[comp] ) / 2;
}
}
void CBCTFrenetSerretFrame::ComputeConsistentNormalVectors( double *tangent,
double *normalLast,
double *normal ) {
double temp[3];
vtkMath::Cross( normalLast, tangent, temp);
vtkMath::Cross( tangent, temp, normal );
}
void CBCTFrenetSerretFrame::ComputeNormalVectors( double *tgNext,
double *tgLast,
double *normal ) {
int comp;
for( comp = 0; comp < 3; comp++ ) {
normal[comp] = ( tgNext[comp] - tgLast[comp] );
}
if( vtkMath::Norm(normal) == 0 ) {
double unit[3] = {1, 0, 0};
vtkMath::Cross( tgLast, unit, normal );
}
}
void CBCTFrenetSerretFrame::RotateVector( double *vector, const double *axis, double angle ) {
double UdotN = vtkMath::Dot(vector, axis);
double NvectU[3];
vtkMath::Cross(axis, vector, NvectU);
for( int comp = 0; comp < 3 ; comp++) {
vector[comp] = cos( angle ) * vector[comp]
+ (1 - cos( angle )) * UdotN * axis[comp]
+ sin( angle ) * NvectU[comp];
}
}
4.3 根据点和法向量截取图片(vtkProbeFilter)¶
沿着样条曲线切割图片
class CBCTFrenetSerretFrame;
class vtkImageReslice;
/**
* @brief The CBCTSplineDrivenImageSlicer class
* 沿着样条曲线切割图片
*/
class CBCTSplineDrivenImageSlicer : public vtkImageAlgorithm {
public:
vtkTypeMacro(CBCTSplineDrivenImageSlicer, vtkImageAlgorithm)
static CBCTSplineDrivenImageSlicer *New();
void SetPathConnection(int id, vtkAlgorithmOutput *algOutput);
void SetPathConnection(vtkAlgorithmOutput *algOutput);
vtkAlgorithmOutput *GetPathConnection( );
vtkSetMacro(offset_point_, vtkIdType)
protected:
CBCTSplineDrivenImageSlicer();
~CBCTSplineDrivenImageSlicer()override;
virtual int RequestData(vtkInformation *, vtkInformationVector **,
vtkInformationVector *)override;
virtual int FillInputPortInformation(int port, vtkInformation *info)override;
virtual int FillOutputPortInformation( int, vtkInformation *)override;
virtual int RequestInformation(vtkInformation *, vtkInformationVector **,
vtkInformationVector *)override;
private:
CBCTSplineDrivenImageSlicer(const CBCTSplineDrivenImageSlicer &);
void operator=(const CBCTSplineDrivenImageSlicer &);
CBCTFrenetSerretFrame *local_frenetFrames_;
vtkImageReslice *reslicer_;
int slice_extent_[2]; // 输出image的xy像素数量
double slice_spacing_[2]; // 输出image的xy间隔
double slice_thickness_; // 输出image的z轴间隔
double incidence_;// 初始法向量的旋转
vtkIdType offset_point_;
vtkIdType offset_line_;
vtkIdType probe_input_;
};
#include"vtkPoints.h"
#include"vtkPolyData.h"
#include"vtkCellArray.h"
#include "vtkImageReslice.h"
#include "vtkFrenetSerretFrame.h"
#include "vtkPlaneSource.h"
#include "vtkImageData.h"
#include "vtkProbeFilter.h"
#include "vtkMatrix4x4.h"
#include "vtkImageAppend.h"
#include "vtkDoubleArray.h"
#include "vtkPointData.h"
#include "vtkMath.h"
#include "vtkInformation.h"
#include "vtkInformationVector.h"
#include "vtkObjectFactory.h"
#include "vtkSmartPointer.h"
#include "vtkStreamingDemandDrivenPipeline.h"
vtkStandardNewMacro(CBCTSplineDrivenImageSlicer);
CBCTSplineDrivenImageSlicer::CBCTSplineDrivenImageSlicer( ) {
this->local_frenetFrames_ = CBCTFrenetSerretFrame::New( );
this->reslicer_ = vtkImageReslice::New();
this->slice_extent_[0] = 256;
this->slice_extent_[1] = 256;
this->slice_spacing_[0] = 0.2;
this->slice_spacing_[1] = 0.2;
this->slice_thickness_ = 0.2;
this->offset_point_ = 0;
this->offset_line_ = 0;
this->incidence_ = 0;
this->probe_input_ = 0;
this->SetNumberOfInputPorts( 2 );
this->SetNumberOfOutputPorts( 2 );
this->SetInputArrayToProcess(0, 0, 0, vtkDataObject::FIELD_ASSOCIATION_POINTS,
vtkDataSetAttributes::SCALARS);
}
CBCTSplineDrivenImageSlicer::~CBCTSplineDrivenImageSlicer( ) {
this->local_frenetFrames_->Delete( );
this->reslicer_->Delete( );
}
void CBCTSplineDrivenImageSlicer::SetPathConnection(int id, vtkAlgorithmOutput *algOutput) {
if (id < 0) {
vtkErrorMacro("Bad index " << id << " for source.");
return;
}
int numConnections = this->GetNumberOfInputConnections(1);
if (id < numConnections) {
this->SetNthInputConnection(1, id, algOutput);
} else if (id == numConnections && algOutput) {
this->AddInputConnection(1, algOutput);
} else if (algOutput) {
vtkWarningMacro("The source id provided is larger than the maximum "
"source id, using " << numConnections << " instead.");
this->AddInputConnection(1, algOutput);
}
}
void CBCTSplineDrivenImageSlicer::SetPathConnection(vtkAlgorithmOutput *algOutput) {
this->SetPathConnection(0, algOutput);
}
vtkAlgorithmOutput *CBCTSplineDrivenImageSlicer::GetPathConnection() {
return( this->GetInputConnection( 1, 0 ) );
}
int CBCTSplineDrivenImageSlicer::FillInputPortInformation(
int port, vtkInformation *info) {
if( port == 0 ) {
info->Set(vtkAlgorithm::INPUT_REQUIRED_DATA_TYPE(), "vtkImageData");
} else {
info->Set(vtkAlgorithm::INPUT_REQUIRED_DATA_TYPE(), "vtkPolyData");
}
return 1;
}
int CBCTSplineDrivenImageSlicer::FillOutputPortInformation(
int port, vtkInformation *info) {
if (port == 0) {
info->Set(vtkDataObject::DATA_TYPE_NAME(), "vtkImageData");
}
if (port == 1) {
info->Set(vtkDataObject::DATA_TYPE_NAME(), "vtkPolyData");
}
return 1;
}
int CBCTSplineDrivenImageSlicer::RequestInformation (
vtkInformation *vtkNotUsed(request),
vtkInformationVector **inputVector,
vtkInformationVector *outputVector) {
vtkInformation *outInfo = outputVector->GetInformationObject(0);
int extent[6] = {0, this->slice_extent_[0] - 1,
0, this->slice_extent_[1] - 1,
0, 1
};
double spacing[3] = {this->slice_spacing_[0], this->slice_spacing_[1], this->slice_thickness_};
outInfo->Set(vtkDataObject::SPACING(), spacing, 3);
outInfo->Set(vtkStreamingDemandDrivenPipeline::WHOLE_EXTENT(), extent, 6);
return 1;
}
int CBCTSplineDrivenImageSlicer::RequestData(
vtkInformation *vtkNotUsed(request),
vtkInformationVector **inputVector,
vtkInformationVector *outputVector) {
// 获取信息对象
vtkInformation *inInfo = inputVector[0]->GetInformationObject(0);
vtkInformation *pathInfo = inputVector[1]->GetInformationObject(0);
vtkInformation *outImageInfo = outputVector->GetInformationObject(0);
vtkInformation *outPlaneInfo = outputVector->GetInformationObject(1);
// 获取输入和输出
vtkImageData *input = vtkImageData::SafeDownCast(
inInfo->Get(vtkDataObject::DATA_OBJECT()));
vtkImageData *inputCopy = vtkImageData::New( );
inputCopy->ShallowCopy( input );
vtkPolyData *inputPath = vtkPolyData::SafeDownCast(
pathInfo->Get(vtkDataObject::DATA_OBJECT()));
vtkImageData *outputImage = vtkImageData::SafeDownCast(
outImageInfo->Get(vtkDataObject::DATA_OBJECT()));
vtkPolyData *outputPlane = vtkPolyData::SafeDownCast(
outPlaneInfo->Get(vtkDataObject::DATA_OBJECT()));
vtkSmartPointer<vtkPolyData> pathCopy = vtkSmartPointer<vtkPolyData>::New( );
pathCopy->ShallowCopy( inputPath );
// 计算路径的局部法线和切线
this->local_frenetFrames_->SetInputData( pathCopy );
this->local_frenetFrames_->Setview_up_(this->incidence_ );
this->local_frenetFrames_->Update( );
// 路径将包含点数据数组“切线”和“向量”
vtkPolyData *path = static_cast<vtkPolyData *>
(this->local_frenetFrames_->GetOutputDataObject( 0 ));
// 计算单元格中使用了多少个点。如果循环,点可以使用多次
// 不使用NumberOfPoints,因为我们只需要线条和点
vtkCellArray *lines = path->GetLines( );
lines->InitTraversal( );
vtkIdType nbCellPoints;
vtkIdType *points;
vtkIdType cellId = -1;
do {
lines->GetNextCell( nbCellPoints, points);
cellId++;
} while( cellId != this->offset_line_ );
vtkIdType ptId = this->offset_point_;
if( ptId >= nbCellPoints ) {
ptId = nbCellPoints - 1;
}
// 建立一个新的reslicer与图像输入作为输入。
this->reslicer_->SetInputData( inputCopy );
// 获取ptId点的Frenet-Serret图表:
// - position (center)
// - tangent T
// - normal N
double center[3];
path->GetPoints( )->GetPoint( ptId, center );
vtkDoubleArray *pathTangents = static_cast<vtkDoubleArray *>
(path->GetPointData( )->GetArray( "FSTangents" ));
double tangent[3];
pathTangents->GetTuple( ptId, tangent );
vtkDoubleArray *pathNormals = static_cast<vtkDoubleArray *>
(path->GetPointData( )->GetArray( "FSNormals" ));
double normal[3];
pathNormals->GetTuple( ptId, normal );
// Frenet-Serret 图表由 T, N and B = T ^ N
double crossProduct[3];
vtkMath::Cross( tangent, normal, crossProduct );
// 构建平面输出,该输出将表示三维视图中的切片位置
vtkSmartPointer<vtkPlaneSource> plane
= vtkSmartPointer<vtkPlaneSource>::New( );
double planeOrigin[3];
double planePoint1[3];
double planePoint2[3];
for( int comp = 0; comp < 3; comp ++) {
planeOrigin[comp] = center[comp] - normal[comp] * this->slice_extent_[1] * this->slice_spacing_[1] / 2.0
- crossProduct[comp] * this->slice_extent_[0] * this->slice_spacing_[0] / 2.0;
planePoint1[comp] = planeOrigin[comp] + crossProduct[comp] * this->slice_extent_[0] * this->slice_spacing_[0];
planePoint2[comp] = planeOrigin[comp] + normal[comp] * this->slice_extent_[1] * this->slice_spacing_[1];
}
plane->SetOrigin(planeOrigin);
plane->SetPoint1(planePoint1);
plane->SetPoint2(planePoint2);
plane->SetResolution(this->slice_extent_[0],
this->slice_extent_[1]);
plane->Update();
if( this->probe_input_ == 1 ) {
vtkSmartPointer<vtkProbeFilter> probe = vtkSmartPointer<vtkProbeFilter>::New( );
probe->SetInputConnection( plane->GetOutputPort( ) );
probe->SetSourceData( inputCopy );
probe->Update( );
outputPlane->DeepCopy(probe->GetOutputDataObject(0));
} else {
outputPlane->DeepCopy(plane->GetOutputDataObject(0));
}
// 构建转换矩阵
vtkMatrix4x4 *resliceAxes = vtkMatrix4x4::New( );
resliceAxes->Identity();
double origin[4];
// 仿照 vtkImageReslice:
// - 1st column contains the resliced image x-axis
// - 2nd column contains the resliced image y-axis
// - 3rd column contains the normal of the resliced image plane
// -> 1st column is normal to the path
// -> 3nd column is tangent to the path
// -> 2nd column is B = T^N
for ( int comp = 0; comp < 3; comp++ ) {
resliceAxes->SetElement(0, comp, crossProduct[comp]);
resliceAxes->SetElement(1, comp, normal[comp]);
resliceAxes->SetElement(2, comp, tangent[comp]);
origin[comp] = center[comp] -
normal[comp] * this->slice_extent_[1] * this->slice_spacing_[1] / 2.0 -
crossProduct[comp] * this->slice_extent_[0] * this->slice_spacing_[0] / 2.0;
}
origin[3] = 1.0;
double originXYZW[4];
resliceAxes->MultiplyPoint(origin, originXYZW);
resliceAxes->Transpose();
double neworiginXYZW[4];
resliceAxes->MultiplyPoint(originXYZW, neworiginXYZW);
resliceAxes->SetElement(0, 3, neworiginXYZW[0]);
resliceAxes->SetElement(1, 3, neworiginXYZW[1]);
resliceAxes->SetElement(2, 3, neworiginXYZW[2]);
this->reslicer_->SetResliceAxes( resliceAxes );
this->reslicer_->SetInformationInput( input );
this->reslicer_->SetInterpolationModeToCubic( );
this->reslicer_->SetOutputDimensionality( 2 );
this->reslicer_->SetOutputOrigin(0, 0, 0);
this->reslicer_->SetOutputExtent(0, this->slice_extent_[0] - 1,
0, this->slice_extent_[1] - 1,
0, 1);
this->reslicer_->SetOutputSpacing(this->slice_spacing_[0],
this->slice_spacing_[1],
this->slice_thickness_);
this->reslicer_->Update();
resliceAxes->Delete();
outputImage->DeepCopy(this->reslicer_->GetOutputDataObject(0));
outputImage->GetPointData()->GetScalars()->SetName("ReslicedImage");
return 1;
}
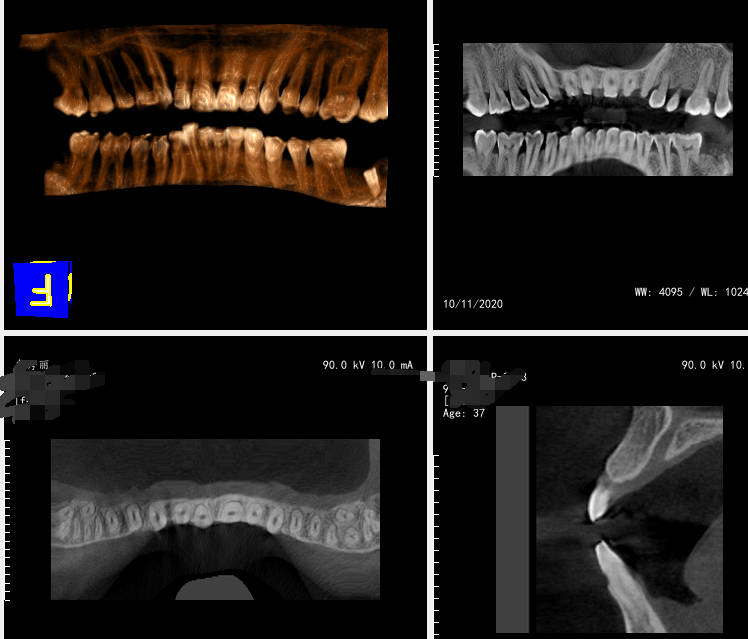
4.3.1 每张图片拼接起来(vtkImageAppend)¶
就是作者的案例,加了个Permute和Flip用来摆正
vtkNew<vtkImageAppend> append;
append->SetAppendAxis(2);
vtkNew<CBCTSplineDrivenImageSlicer> reslicer;
reslicer->SetInputData(img_reader->GetOutput());
reslicer->SetPathConnection(spline_filter->GetOutputPort());
long long nb_points = spline_filter->GetOutput()->GetNumberOfPoints();
for(int pt_id = 0; pt_id < nb_points; pt_id++) {
reslicer->Setoffset_point_(pt_id);
reslicer->Update();
vtkNew<vtkImageData> tempSlice;
tempSlice->DeepCopy(reslicer->GetOutput());
append->AddInputData(tempSlice);
}
append->Update();
vtkNew<vtkImagePermute> permute_filter;
permute_filter->SetInputData(append->GetOutput());
permute_filter->SetFilteredAxes(2, 0, 1);
permute_filter->Update();
vtkNew<vtkImageFlip> flip_filter;
flip_filter->SetInputData(permute_filter->GetOutput());
flip_filter->SetFilteredAxes(1);
flip_filter->Update();